This one was a long, drawn-out schedule. In order to accommodate its numerically-challenged budget, it was thought that the schedule could be extended to several months so that we could put in other jobs in between this one. However, near the end of the schedule, we started picking it up again in earnest, and ended ironically with a quick tempo. Over-extended jobs like these invariably turn out to be rush jobs in the end. This wasn’t the case of procrastination, but the limiting of hours that could be spent on it. Consequently, we were set to do other jobs, and in the end, it could be argued that we had to spend more time on it due to the inefficiency of going back-and-forth different things.
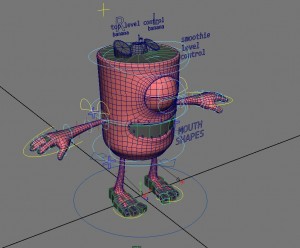
My contribution to this ad was that I helped think out the render strategy, helped the render layer setups, modelled the base of the blender (yay!), troubleshooted character models as it relates to the rig, did the white mist effect using Maya fluids, did a breaking ice simulation that replaced by another simulation, helped shade a few of the elements, and assisted in the initial comping.
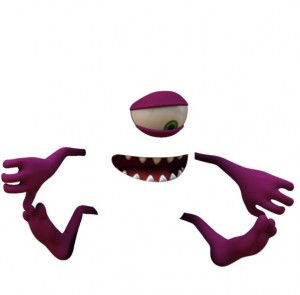
The render strategy was thought out early; we saw the character design as a final art for a poster, and Terry and I worked out the booby-traps in making this character work in 3d. It all boiled down to the refractive properties of the characters especially around the cavities (eg eyes, mouth). If modelled literally, the character would look wrong (and slightly horrific) in many angles, since the glass would refract the dark cavities.
The solution was to make render the glass as though the smoothie content was unbroken by the mouth or eye cavities. This way, the refraction was as seamless as possible. Then, it was a simple matter of comping, using masks, the mouth cavity and eyes, and the rest of the limbs.
Then, it was a simple matter of comping, using masks, the mouth cavity and eyes, and the rest of the limbs.
Apart from my usual responsibilities maintaining scene integrity throughout the whole project, one of my other main contribution, was rigging the characters, which I used AdvancedSkeleton with. The rig went through a lot of iterations in its cycle, mainly to do with consideration of the render elements that changed as we moved forward. Towards the end, collision objects were added into the rig to affect the ice that broke apart around the characters.
Because these two characters were identically in many respects, yet had considerable differences, too, I opted to create a generic rig was which featured elements from both characters. The most notable feature are the fruits sitting on top of the characters. A simple boolean switch handled the switch between the ‘pink’ and ‘purple’ characters.
In keeping with Sandline workflow the rigs had to be uniquely named, so I wrote a simple variant export. When a rig change had to be made, the generic rig was modified, and the variant export was done.
One of the workflow strategies we developed in the Mother Earth Pingos ad was using rigging low-resolution meshes into lattices in the rig itself, whose lattice points would be exported as vertex animation. Then we use the same lattice setup in the models file, and put the high-resolution meshes there. This is the approach we used for controlling the high-resolution fruit meshes on top of the character (though, on reflection, a lower resolution would have sufficed).